Hello,
I'm a beginner in V-REP and I have been trying to make a custom controller which is including force control and PD control in Cartesian coordinate
For the first step, applying joint PD control of UR5 was successful, so I tried to get Jacobian matrix. In my case, I need Jacobian matrix for every step to calculate (J^T)F.
I read some documents as below:
https://www.coppeliarobotics.com/helpFi ... ements.htm
https://www.coppeliarobotics.com/helpFi ... Plugin.htm
https://forum.coppeliarobotics.com/viewtopic.php?t=5487
, however, I met a problem
I used sim.getIKGroupMatrix after making dummies in IK mode, an error occurred such that
- IK group does not exist. (in function 'sim.getIkGroupMatrix')
I upload my file that I'm working on, and I want to get feedback to calculate Jacobian matrix. The problem was in 134 row in child script
https://drive.google.com/file/d/1kOtjgf ... sp=sharing
Thanks
Calculating Jacobian matrix
Re: Calculating Jacobian matrix
Hello,
since CoppeliaSim V4.2.0, you should create IK tasks via the API: this is quite straightforward, and gives you much more flexibility, also allowing to debug problems faster. This means that all FK/IK related functionality now is handled via the kinematics plugin, which exports API functions under the simIK.* namespace. The mentioned page illustrates the approach with a simple example. You can find many more examples in the folder scenes/kinematics.
Cheers
since CoppeliaSim V4.2.0, you should create IK tasks via the API: this is quite straightforward, and gives you much more flexibility, also allowing to debug problems faster. This means that all FK/IK related functionality now is handled via the kinematics plugin, which exports API functions under the simIK.* namespace. The mentioned page illustrates the approach with a simple example. You can find many more examples in the folder scenes/kinematics.
Cheers
Re: Calculating Jacobian matrix
Excuse me, have you solved this problem? How to get the Jacobian matrix of UR5 and DH parameters? Thanks in advance.inje wrote: ↑11 Nov 2021, 08:24 Hello,
I'm a beginner in V-REP and I have been trying to make a custom controller which is including force control and PD control in Cartesian coordinate
For the first step, applying joint PD control of UR5 was successful, so I tried to get Jacobian matrix. In my case, I need Jacobian matrix for every step to calculate (J^T)F.
I read some documents as below:
https://www.coppeliarobotics.com/helpFi ... ements.htm
https://www.coppeliarobotics.com/helpFi ... Plugin.htm
https://forum.coppeliarobotics.com/viewtopic.php?t=5487
, however, I met a problem
I used sim.getIKGroupMatrix after making dummies in IK mode, an error occurred such that
- IK group does not exist. (in function 'sim.getIkGroupMatrix')
I upload my file that I'm working on, and I want to get feedback to calculate Jacobian matrix. The problem was in 134 row in child script
https://drive.google.com/file/d/1kOtjgf ... sp=sharing
Thanks
Re: Calculating Jacobian matrix
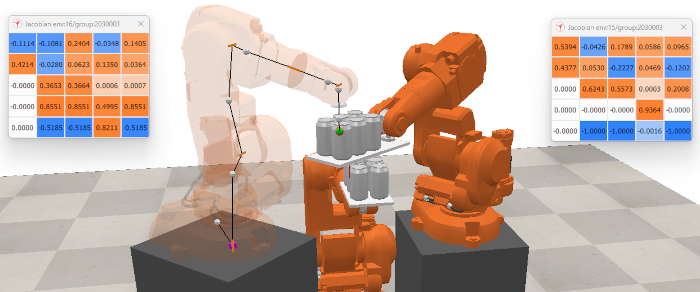
With CoppeliaSim V4.5, you can now directly display the Jacobian via [Menu bar --> Tools --> Visualize IK world]. The DH creator and extractor add-ons have also been improved.
But keep in mind, a same kinematic chain has an infinite different DH parameters possible, depending on how the joint locations/orientations was selected.
But keep in mind, a same kinematic chain has an infinite different DH parameters possible, depending on how the joint locations/orientations was selected.