How to control User Parameter in another Script?
Posted: 04 Jun 2020, 21:11
Hello,
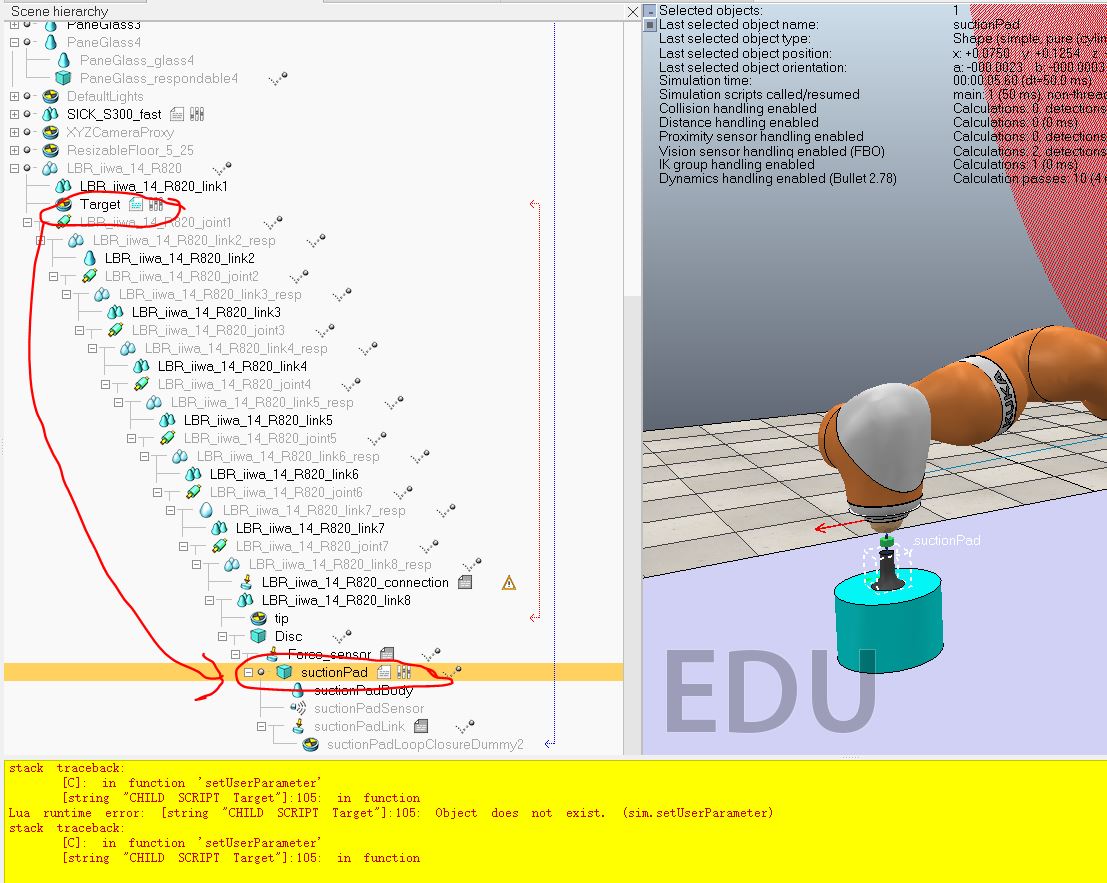
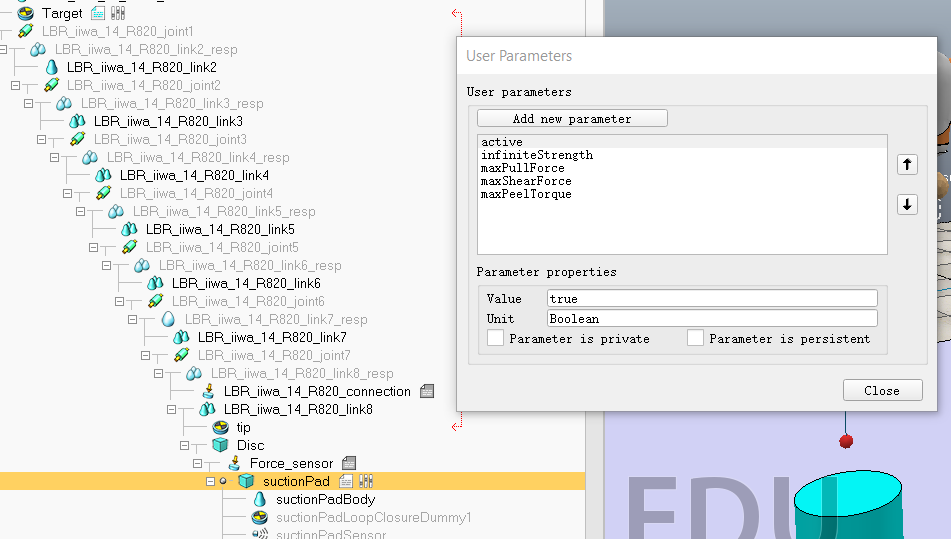
i want to control the User Parameter of "suctionPad" in the script of "Target Dummy". So at the end of the Path, the User Parameter is changed to "false". Then the cylinder can fall.
But it's not successful. In "Target" script i used function
suctionPad= sim.getObjectHandle("suctionPad")
suctionPadScript = sim.getScriptAssociatedWithObject(suctionPad)
sim.setUserParameter(suctionPadScript,"active","false")
But error comes. It says "Object does not exist. (sim.setUserParameter)"
best regards
Shaoxiang
i want to control the User Parameter of "suctionPad" in the script of "Target Dummy". So at the end of the Path, the User Parameter is changed to "false". Then the cylinder can fall.
But it's not successful. In "Target" script i used function
suctionPad= sim.getObjectHandle("suctionPad")
suctionPadScript = sim.getScriptAssociatedWithObject(suctionPad)
sim.setUserParameter(suctionPadScript,"active","false")
But error comes. It says "Object does not exist. (sim.setUserParameter)"
best regards
Shaoxiang
Code: Select all
-- do some initialization here
-- Get handles and postions of dummies
tip = sim.getObjectHandle("tip")
ownHandle = sim.getObjectHandle("Target")
suctionPad= sim.getObjectHandle("suctionPad")
suctionPadScript = sim.getScriptAssociatedWithObject(suctionPad)
startPath1=sim.getObjectHandle("Path1_1")
startPath2=sim.getObjectHandle("Path1_2")
mittelPath1=sim.getObjectHandle("Path2_1")
mittelPath2=sim.getObjectHandle("Path2_2")
endPath1=sim.getObjectHandle("Path3_1")
endPath2=sim.getObjectHandle("Path3_2")
pathLength1=sim.getPathLength(startPath1)
pathLength2=sim.getPathLength(startPath2)
pathLength3=sim.getPathLength(mittelPath1)
pathLength4=sim.getPathLength(mittelPath2)
pathLength5=sim.getPathLength(endPath1)
pathLength6=sim.getPathLength(endPath2)
speed= sim.getUserParameter(sim.handle_self,'speed')-- end-effector velocity in m/s
sim.setUserParameter(ownHandle,'@enable','')
timestep=sim.getSimulationTimeStep() -- in s
currentPositionRelative1=0
currentPositionRelative2=0
currentPositionRelative3=0
currentPositionRelative4=0
currentPositionRelative5=0
currentPositionRelative6=0
moveForward=true
epsilon1=0.01
epsilon2=0.01
epsilon3=0.01
epsilon4=0.01
epsilon5=0.01
epsilon6=0.01
function sysCall_threadmain()
-- Put some initialization code here
while sim.getSimulationState()~=sim.simulation_advancing_abouttostop do
slowerWork=sim.getStringSignal("slowerWork")
if slowerWork=="1" then
slowerWork=true
else
slowerWork=false
end
-- path1
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength1
if currentPositionRelative1 < 1-epsilon1 and moveForward then
currentPositionRelative1=currentPositionRelative1+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(startPath1,currentPositionRelative1)
pathOrientation=sim.getOrientationOnPath(startPath1,currentPositionRelative1)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength1
if currentPositionRelative1 < 1-epsilon1 and moveForward then
currentPositionRelative1=currentPositionRelative1+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(startPath1,currentPositionRelative1)
pathOrientation=sim.getOrientationOnPath(startPath1,currentPositionRelative1)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
-- path2
if currentPositionRelative1 >= 1-epsilon1 then
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength2
if currentPositionRelative2 < 1-epsilon2 and moveForward then
currentPositionRelative2=currentPositionRelative2+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(startPath2,currentPositionRelative2)
pathOrientation=sim.getOrientationOnPath(startPath2,currentPositionRelative2)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength2
if currentPositionRelative2 < 1-epsilon2 and moveForward then
currentPositionRelative2=currentPositionRelative2+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(startPath2,currentPositionRelative2)
pathOrientation=sim.getOrientationOnPath(startPath2,currentPositionRelative2)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
end
-- path3
if currentPositionRelative2 >= 1-epsilon2 then
sim.setUserParameter(suctionPadScript,"active","false")
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength3
if currentPositionRelative3 < 1-epsilon3 and moveForward then
currentPositionRelative3=currentPositionRelative3+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(mittelPath1,currentPositionRelative3)
pathOrientation=sim.getOrientationOnPath(mittelPath1,currentPositionRelative3)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength3
if currentPositionRelative3 < 1-epsilon3 and moveForward then
currentPositionRelative3=currentPositionRelative3+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(mittelPath1,currentPositionRelative3)
pathOrientation=sim.getOrientationOnPath(mittelPath1,currentPositionRelative3)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
end
-- path4
if currentPositionRelative3 >= 1-epsilon3 then
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength4
if currentPositionRelative4 < 1-epsilon4 and moveForward then
currentPositionRelative4=currentPositionRelative3+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(endPath1,currentPositionRelative4)
pathOrientation=sim.getOrientationOnPath(endPath1,currentPositionRelative4)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength4
if currentPositionRelative4 < 1-epsilon4 and moveForward then
currentPositionRelative4=currentPositionRelative4+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(endPath1,currentPositionRelative4)
pathOrientation=sim.getOrientationOnPath(endPath1,currentPositionRelative4)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
end
-- path5
if currentPositionRelative4 >= 1-epsilon4 then
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength5
if currentPositionRelative5 < 1-epsilon5 and moveForward then
currentPositionRelative5=currentPositionRelative5+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(endPath2,currentPositionRelative5)
pathOrientation=sim.getOrientationOnPath(endPath2,currentPositionRelative5)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength5
if currentPositionRelative5 < 1-epsilon5 and moveForward then
currentPositionRelative5=currentPositionRelative5+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(endPath2,currentPositionRelative5)
pathOrientation=sim.getOrientationOnPath(endPath2,currentPositionRelative5)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
end
-- path6
if currentPositionRelative5 >= 1-epsilon5 then
if not slowerWork then
pathAdvanceAbsolute=speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength6
if currentPositionRelative6 < 1-epsilon6 and moveForward then
currentPositionRelative6=currentPositionRelative6+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(mittelPath2,currentPositionRelative6)
pathOrientation=sim.getOrientationOnPath(mittelPath2,currentPositionRelative6)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
else
pathAdvanceAbsolute=0.2*speed*timestep -- in m
pathAdvanceRelative=pathAdvanceAbsolute/pathLength6
if currentPositionRelative6 < 1-epsilon6 and moveForward then
currentPositionRelative6=currentPositionRelative6+pathAdvanceRelative
pathPosition=sim.getPositionOnPath(mittelPath2,currentPositionRelative6)
pathOrientation=sim.getOrientationOnPath(mittelPath2,currentPositionRelative6)
objectPositionIsSet = sim.setObjectPosition(ownHandle,-1,pathPosition)
objectOrientationIsSet = sim.setObjectOrientation(ownHandle,-1,pathOrientation)
end
end
end
if currentPositionRelative6 >= 1-epsilon6 then
currentPositionRelative1=0
currentPositionRelative2=0
currentPositionRelative3=0
currentPositionRelative4=0
currentPositionRelative5=0
currentPositionRelative6=0
end
end
end
function sysCall_cleanup()
-- Put some clean-up code here
end
-- See the user manual or the available code snippets for additional callback functions and details