Program crashes while using remote control
Posted: 10 Jun 2022, 11:31
Hello, I'm using v4.1
In the scene, basically I'm producting some object at the start point of conveyor and at the end of the conveyor my robot (configured on IK mode and follows path) is picking object and placing some appropriate positions.;
In coppelia side everything is okey and program works with 0 error.
When I try to remote control by python, I can take and show my vision sensor image on python. Then I proccess the image, after that make my robot movements for image processing results.
Some program functions is not available on python side such as sim.followpath
I put my every single robot moves in seperate functions and I'm using "simxCallScriptFunction" method to call function.
I'm running coppelia first and then python, after taking and processing the image, program is freezing and shows nothing as an error. At this point I can not do anything with program(stopping scene etc.) and I have to reboot program.
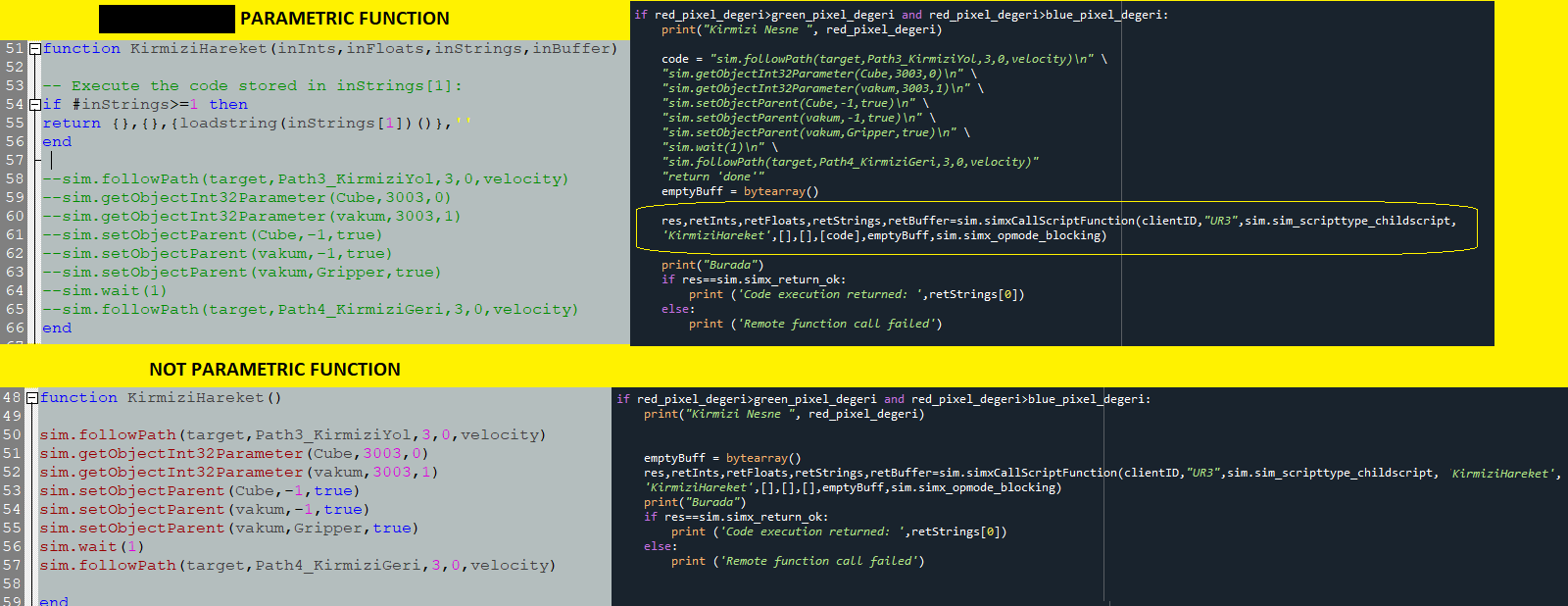
I tried non parametic function and I also tried parametric type of function (I write down my robot moving codes on python as a string and then running the string as code on coppelia)
Both trials occurs same result --> Program is completely freezing and cant do anything.
What can be wrong or How can I fix the "freezing" problem?
Here is my codes on both sides and both methods
In the scene, basically I'm producting some object at the start point of conveyor and at the end of the conveyor my robot (configured on IK mode and follows path) is picking object and placing some appropriate positions.;
In coppelia side everything is okey and program works with 0 error.
When I try to remote control by python, I can take and show my vision sensor image on python. Then I proccess the image, after that make my robot movements for image processing results.
Some program functions is not available on python side such as sim.followpath
I put my every single robot moves in seperate functions and I'm using "simxCallScriptFunction" method to call function.
I'm running coppelia first and then python, after taking and processing the image, program is freezing and shows nothing as an error. At this point I can not do anything with program(stopping scene etc.) and I have to reboot program.
I tried non parametic function and I also tried parametric type of function (I write down my robot moving codes on python as a string and then running the string as code on coppelia)
Both trials occurs same result --> Program is completely freezing and cant do anything.
What can be wrong or How can I fix the "freezing" problem?
Here is my codes on both sides and both methods